Loss of traction
The torque applied to each driving wheel is a result of the engine, transmission and drive axles applying a twisting force against the resistance of the traction at that roadwheel. In lower gears and thus at lower speeds, and unless the load is exceptionally high, the drivetrain can supply as much torque as necessary, so the limiting factor becomes the traction under each wheel. It is therefore convenient to define traction as the amount of torque that can be generated between the tire and the road surface, before the wheel starts to slip. If the torque applied to one of the drive wheels exceeds the threshold of traction, then that wheel will spin, and thus only provide torque at each other driven wheel limited by the sliding friction at the slipping wheel. The reduced net traction may still be enough to propel the vehicle.
A conventional "open" (non-locked or otherwise traction-aided) differential always supplies close to equal (because of limited internal friction) torque to each side. To illustrate how this can limit torque applied to the driving wheels, imagine a simple rear-wheel drive vehicle, with one rear roadwheel on asphalt with good grip, and the other on a patch of slippery ice. It takes very little torque to spin the side on slippery ice, and because a differential splits torque equally to each side, the torque that is applied to the side that is on asphalt is limited to this amount. Based on the load, gradient, et cetera, the vehicle requires a certain amount of torque applied to the drive wheels to move forward. Since an open differential limits total torque applied to both drive wheels to the amount used by the lower traction wheel multiplied by a factor of 2, when one wheel is on a slippery surface, the
Traction-aiding devices
Centrifugal weights can be used in conjunction with, or in place of the preload spring(s) to force the side gears into the carrier. The Eaton G80 (sold by General Motors under the Gov-Lok name) is one example of this. In theory the centrifugal action should offer a more progressive application of torque bias, and therefore fewer undesirable side-effects. The added complexity can cause premature failure under heavy use.
A locking differential typified by the Detroit Locker (now an Eaton brand) is not a differential at all. In place of the differential is a pair of dog clutches and preload springs that force the two drive axles to "lock up" with the case (typically this type uses the case of a standard open differential, replacing the differential gears) while driving in a straight line. During cornering, one of the dog clutches should disengage, causing one side to freewheel. In practice the unlocking can be problematic and erratic.
Remote locking differentials are normal differentials fitted with a mechanism to lock the differential (and therefore stop all differential action) using air or electromagnetic actuators that can be engaged or released on demand by the driver. When locked, they allow no difference in speed between the two wheels on the axle. They employ a mechanism for allowing the axles to be locked relative to each other, causing both wheels to turn at the same speed regardless of which has more traction; this is equivalent to effectively bypassing the differential gears entirely. Devices like this have been used on heavy trucks for a very long time. In recent years smaller models have been developed for light trucks and passenger cars. In light trucks, the locking function can be engaged for off-road use, and disengaged for a safe ride on the road. For cars the locking function is typically used for drag racing regardless of the location.
A worm and spur gear differential, such as the Torsen differential, uses the friction is between the gear teeth rather than at added clutches. It is a relatively new and completely unique differential design that has torque bias as a standard function. This type of differential applies more torque to the driven wheel with highest resistance (grip or traction) when the limit of friction is reached at that other wheel. Under normal conditions it behaves exactly like an open differential. In cases where both driven wheels are spinning, the Torsen automatically balances the torque instantly, creating a stable and safe ride. Transitions between slick and grippy surfaces cause no instability, unlike other limited slip and locking traction adders that lock both drive wheels together by default. When tested with the wheels off the ground, if one wheel is rotated with the differential case held, the other wheel will still rotate in the opposite direction as for an open differential but there will be some frictional losses and the torque will be distributed at other than 50/50. Although named as being "torque-sensing", it actually distinguishes itself by providing torque bias in proportion to available grip. 3D Animation of a Torsen Differential
A very high-friction differential, such as the ZF "sliding pins and cams" type, so that there is locking from very high internal friction. When tested with the wheels off the ground with torque applied to one wheel it will lock, but it is still possible for the differential action to occur in use, albeit with considerable frictional losses, and with the road loads at each wheel in opposite directions rather than the same (acting with a "locking and releasing" action rather than a distributed torque). This 1935 design was possibly the first attempt at improving an open differential for increased power delivery.
Electronic traction control systems usually use the anti-lock braking system (ABS) speed sensors to detect a spinning roadwheel, and apply the brake to that wheel. This progressively raises the reaction torque at that roadwheel, and the differential compensates by transmitting more torque through the other roadwheel—the one with better traction. In Volkswagen Group vehicles, this specific function is called 'Electronic Differential Lock' (EDL).
A spool is a solid 1-piece part that completely replaces the differential and its case. A variant called "mini-spool" replaces the differential gears within the differential carrier, retaining the stock carrier. A spool locks both axle shafts together 100%. With both wheels turning at exactly the same rate, the burden for providing maximum traction falls upon the surface driven on. The primary advantage to a spool is, contrary to popular belief, not maximum traction but maximum simplicity. Spools are often used in drag racing applications, where the vehicle is to be driven in a straight line while applying tremendous torque to both wheels, and where the track is specially prepared for even traction.
In a four-wheel drive vehicle, a viscous coupling unit can replace a centre differential entirely, or be used to limit slip in a conventional 'open' differential. It works on the principle of allowing the two output shafts to counter-rotate relative to each other, by way of a system of slotted plates that operate within a viscous fluid, often silicone. The fluid allows slow relative movements of the shafts, such as those caused by cornering, but will strongly resist high-speed movements, such as those caused by a single wheel spinning. This system is similar to a limited slip differential.
A four-wheel drive (4WD) vehicle will have at least two differentials (one in each axle for each pair of driven roadwheels), and possibly a centre differential to apportion torque between the front and rear axles. In some cases (e.g. Lancia Delta Integrale, Porsche 964 Carrera 4 of 1989 the centre differential is an epicyclic differential (see below) to divide the torque asymmetrically, but at a fixed rate between the front and rear axle. Other methods utilise an 'Automatic Torque Biasing' (ATB) centre differential, such as a Torsen—which is what Audi use in their quattro cars (with longitudinal engines).
Some 4WD vehicles without a centre differential or transfer case should not be driven on dry, paved roads in four-wheel drive mode, as small differences in rotational speed between the front and rear wheels cause a torque to be applied across the transmission. This phenomenon is known as "wind-up", and can cause considerable damage to the transmission or drive train. On loose surfaces these differences are absorbed by the tire slippage on the road surface.
A transfer case typically incorporates a centre differential, allowing the drive shafts to spin at different speeds. This permits the four-wheel drive vehicle to drive on paved surfaces without experiencing "wind-up". Notable exceptions include BorgWarner Torque-On-Demand transfer cases that use an electronically controlled clutch to proportion between 0% to 50% of power to the front wheels as needed. Ford's AdvanceTrac system operates the TOD transfer case and brakes to send up to 100% of engine power to any one wheel.
Active differentials
A relatively new technology is the electronically controlled 'active differential'. An electronic control unit (ECU) uses inputs from multiple sensors, including yaw rate, steering input angle, and lateral acceleration—and adjusts the distribution of torque to compensate for undesirable handling behaviours like understeer. Active differentials used to play a large role in the World Rally Championship, but in the 2006 season the FIA has limited the use of active differentials only to those drivers who have not competed in the World Rall Championship in the last five years.
Fully integrated active differentials are used on the Ferrari F430, Mitsubishi Lancer Evolution, and on the rear wheels in the Acura RL. A version manufactured by ZF is also being offered on the B8 chassis Audi S4 and Audi A4 The Volkswagen Golf GTI Mk7 in Performance trim also has an electronically controlled front-axle transverse differential lock, also known as VAQ.
The second constraint of the differential is passive—it is actuated by the friction kinematics chain through the ground. The difference in torque on the roadwheels and tires (caused by turns or bumpy ground) drives the second degree of freedom, (overcoming the torque of inner friction) to equalise the driving torque on the tires. The sensitivity of the differential depends on the inner friction through the second degree of freedom. All of the differentials (so called "active" and "passive") use clutches and brakes for restricting the second degree of freedom, so all suffer from the same disadvantage—decreased sensitivity to a dynamically changing environment. The sensitivity of the ECU controlled differential is also limited by the time delay caused by sensors and the response time of the actuators.
Automotif Engine One undesirable side effect of a conventional differential is that it can limit traction under less than ideal conditions. The amount of traction required to propel the vehicle at any given moment depends on the load at that instant—how heavy the vehicle is, how much drag and friction there is, the gradient of the road, the vehicle's momentum, and so on.
The torque applied to each driving wheel is a result of the engine, transmission and drive axles applying a twisting force against the resistance of the traction at that roadwheel. In lower gears and thus at lower speeds, and unless the load is exceptionally high, the drivetrain can supply as much torque as necessary, so the limiting factor becomes the traction under each wheel. It is therefore convenient to define traction as the amount of torque that can be generated between the tire and the road surface, before the wheel starts to slip. If the torque applied to one of the drive wheels exceeds the threshold of traction, then that wheel will spin, and thus only provide torque at each other driven wheel limited by the sliding friction at the slipping wheel. The reduced net traction may still be enough to propel the vehicle.
A conventional "open" (non-locked or otherwise traction-aided) differential always supplies close to equal (because of limited internal friction) torque to each side. To illustrate how this can limit torque applied to the driving wheels, imagine a simple rear-wheel drive vehicle, with one rear roadwheel on asphalt with good grip, and the other on a patch of slippery ice. It takes very little torque to spin the side on slippery ice, and because a differential splits torque equally to each side, the torque that is applied to the side that is on asphalt is limited to this amount. Based on the load, gradient, et cetera, the vehicle requires a certain amount of torque applied to the drive wheels to move forward. Since an open differential limits total torque applied to both drive wheels to the amount used by the lower traction wheel multiplied by a factor of 2, when one wheel is on a slippery surface, the
total torque applied to the driving wheels may be lower than
the minimum torque required for vehicle propulsion.
 |
|
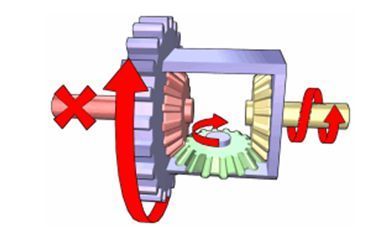
Input torque is applied to the ring gear (blue), which turns
the entire carrier (blue).
The carrier is connected to both sun gears (red and yellow)
only through the planet gear (green). Torque is transmitted to the sun gears
through the planet gear.
The planet gear revolves around the axis of the carrier,
driving the sun gears.
If the resistance at both wheels is equal, the planet gear
revolves without spinning about its own axis, and both wheels turn at the same
rate.
|
A proposed way to distribute the power to the wheels, is to
use the concept of gearless differential, of which a review has been reported
by Provatidis, but the various configurations seem to correspond either to the
"sliding pins and cams" type, such as the ZF B-70 available on early
VWs, or are a variation of the ball differential.
Many newer vehicles feature traction control, which
partially mitigates the poor traction characteristics of an open differential
by using the anti-lock braking system to limit or stop the slippage of the low
traction wheel, increasing the torque that can be applied to both wheels. While
not as effective in propelling a vehicle under poor traction conditions as a
traction-aided differential, it is better than a simple mechanical open
differential with no electronic traction assistance.
 |
|
f the left sun gear (red) encounters resistance, the planet
gear (green) spins as well as revolving, allowing the left sun gear to slow
down, with an equal speeding up of the right sun gear (yellow).
|
Traction-aiding devices
Automotif Engine There are various devices for getting more usable traction from vehicles with differentials. The clutch-type limited slip differential (LSD), often better known as the Positraction brand is the least expensive to manufacture, and is a fairly effective modification of the stock "open" bevel gear differential. More clutch-type LSD units have been used as OEM traction aids than any other design. This modifies a standard bevel gear differential with clutch packs between the end gears and the carrier, and a preload spring that forces the side gears against the clutch packs, and the clutch packs against the differential carrier. This causes the differential to work poorly all of the time in order to give greater traction in some circumstances. This is a compromise device that performs neither of its intended functions well. In rear wheel drive applications on slippery surfaces such as wet or icy roads, the coefficient of friction of the clutch packs will often exceed the coefficient of friction between the tires and the road, causing both drive wheels to spin and leading to loss of control, especially in turns. In front wheel drive or front axle of 4x4 vehicles, the inhibited differential will cause the axles to "wind up" in turns, affecting steering, and leading to loss of control. Clutch packs will wear out over time, causing the loss of traction aid and the possibility of differential failure if clutch parts break off and get into the gears.
Auburn Gear makes a cone-style limited slip differential that dispenses with the clutch packs, and uses the outside surfaces of the side gears and the differential case as the friction materials. This type of LSD is functionally identical to the clutch-type, but purports to last longer before needing service. If it does need service, it must be returned to the factory however.Centrifugal weights can be used in conjunction with, or in place of the preload spring(s) to force the side gears into the carrier. The Eaton G80 (sold by General Motors under the Gov-Lok name) is one example of this. In theory the centrifugal action should offer a more progressive application of torque bias, and therefore fewer undesirable side-effects. The added complexity can cause premature failure under heavy use.
A locking differential typified by the Detroit Locker (now an Eaton brand) is not a differential at all. In place of the differential is a pair of dog clutches and preload springs that force the two drive axles to "lock up" with the case (typically this type uses the case of a standard open differential, replacing the differential gears) while driving in a straight line. During cornering, one of the dog clutches should disengage, causing one side to freewheel. In practice the unlocking can be problematic and erratic.
Remote locking differentials are normal differentials fitted with a mechanism to lock the differential (and therefore stop all differential action) using air or electromagnetic actuators that can be engaged or released on demand by the driver. When locked, they allow no difference in speed between the two wheels on the axle. They employ a mechanism for allowing the axles to be locked relative to each other, causing both wheels to turn at the same speed regardless of which has more traction; this is equivalent to effectively bypassing the differential gears entirely. Devices like this have been used on heavy trucks for a very long time. In recent years smaller models have been developed for light trucks and passenger cars. In light trucks, the locking function can be engaged for off-road use, and disengaged for a safe ride on the road. For cars the locking function is typically used for drag racing regardless of the location.
A worm and spur gear differential, such as the Torsen differential, uses the friction is between the gear teeth rather than at added clutches. It is a relatively new and completely unique differential design that has torque bias as a standard function. This type of differential applies more torque to the driven wheel with highest resistance (grip or traction) when the limit of friction is reached at that other wheel. Under normal conditions it behaves exactly like an open differential. In cases where both driven wheels are spinning, the Torsen automatically balances the torque instantly, creating a stable and safe ride. Transitions between slick and grippy surfaces cause no instability, unlike other limited slip and locking traction adders that lock both drive wheels together by default. When tested with the wheels off the ground, if one wheel is rotated with the differential case held, the other wheel will still rotate in the opposite direction as for an open differential but there will be some frictional losses and the torque will be distributed at other than 50/50. Although named as being "torque-sensing", it actually distinguishes itself by providing torque bias in proportion to available grip. 3D Animation of a Torsen Differential
A very high-friction differential, such as the ZF "sliding pins and cams" type, so that there is locking from very high internal friction. When tested with the wheels off the ground with torque applied to one wheel it will lock, but it is still possible for the differential action to occur in use, albeit with considerable frictional losses, and with the road loads at each wheel in opposite directions rather than the same (acting with a "locking and releasing" action rather than a distributed torque). This 1935 design was possibly the first attempt at improving an open differential for increased power delivery.
Electronic traction control systems usually use the anti-lock braking system (ABS) speed sensors to detect a spinning roadwheel, and apply the brake to that wheel. This progressively raises the reaction torque at that roadwheel, and the differential compensates by transmitting more torque through the other roadwheel—the one with better traction. In Volkswagen Group vehicles, this specific function is called 'Electronic Differential Lock' (EDL).
A spool is a solid 1-piece part that completely replaces the differential and its case. A variant called "mini-spool" replaces the differential gears within the differential carrier, retaining the stock carrier. A spool locks both axle shafts together 100%. With both wheels turning at exactly the same rate, the burden for providing maximum traction falls upon the surface driven on. The primary advantage to a spool is, contrary to popular belief, not maximum traction but maximum simplicity. Spools are often used in drag racing applications, where the vehicle is to be driven in a straight line while applying tremendous torque to both wheels, and where the track is specially prepared for even traction.
In a four-wheel drive vehicle, a viscous coupling unit can replace a centre differential entirely, or be used to limit slip in a conventional 'open' differential. It works on the principle of allowing the two output shafts to counter-rotate relative to each other, by way of a system of slotted plates that operate within a viscous fluid, often silicone. The fluid allows slow relative movements of the shafts, such as those caused by cornering, but will strongly resist high-speed movements, such as those caused by a single wheel spinning. This system is similar to a limited slip differential.
A four-wheel drive (4WD) vehicle will have at least two differentials (one in each axle for each pair of driven roadwheels), and possibly a centre differential to apportion torque between the front and rear axles. In some cases (e.g. Lancia Delta Integrale, Porsche 964 Carrera 4 of 1989 the centre differential is an epicyclic differential (see below) to divide the torque asymmetrically, but at a fixed rate between the front and rear axle. Other methods utilise an 'Automatic Torque Biasing' (ATB) centre differential, such as a Torsen—which is what Audi use in their quattro cars (with longitudinal engines).
Some 4WD vehicles without a centre differential or transfer case should not be driven on dry, paved roads in four-wheel drive mode, as small differences in rotational speed between the front and rear wheels cause a torque to be applied across the transmission. This phenomenon is known as "wind-up", and can cause considerable damage to the transmission or drive train. On loose surfaces these differences are absorbed by the tire slippage on the road surface.
A transfer case typically incorporates a centre differential, allowing the drive shafts to spin at different speeds. This permits the four-wheel drive vehicle to drive on paved surfaces without experiencing "wind-up". Notable exceptions include BorgWarner Torque-On-Demand transfer cases that use an electronically controlled clutch to proportion between 0% to 50% of power to the front wheels as needed. Ford's AdvanceTrac system operates the TOD transfer case and brakes to send up to 100% of engine power to any one wheel.
Active differentials
A relatively new technology is the electronically controlled 'active differential'. An electronic control unit (ECU) uses inputs from multiple sensors, including yaw rate, steering input angle, and lateral acceleration—and adjusts the distribution of torque to compensate for undesirable handling behaviours like understeer. Active differentials used to play a large role in the World Rally Championship, but in the 2006 season the FIA has limited the use of active differentials only to those drivers who have not competed in the World Rall Championship in the last five years.
Fully integrated active differentials are used on the Ferrari F430, Mitsubishi Lancer Evolution, and on the rear wheels in the Acura RL. A version manufactured by ZF is also being offered on the B8 chassis Audi S4 and Audi A4 The Volkswagen Golf GTI Mk7 in Performance trim also has an electronically controlled front-axle transverse differential lock, also known as VAQ.
The second constraint of the differential is passive—it is actuated by the friction kinematics chain through the ground. The difference in torque on the roadwheels and tires (caused by turns or bumpy ground) drives the second degree of freedom, (overcoming the torque of inner friction) to equalise the driving torque on the tires. The sensitivity of the differential depends on the inner friction through the second degree of freedom. All of the differentials (so called "active" and "passive") use clutches and brakes for restricting the second degree of freedom, so all suffer from the same disadvantage—decreased sensitivity to a dynamically changing environment. The sensitivity of the ECU controlled differential is also limited by the time delay caused by sensors and the response time of the actuators.
Automobiles without differentials
Although most automobiles in the developed world use differentials there are a few that do not. Several different types exist:
Race cars and trucks in certain classes. Drag racing is done in a straight line (and often on a prepared surface), which obviates the need for a differential. A spool is used to make a solid connection between both drive wheels, which is simpler and less likely to break under very heavy acceleration. Racing on dirt or mud tracks also allows the use of spools, because the loose surface gives way while cornering. NASCAR mandates the use of spools in their cars, which does cause axle wind-up, and degrades handling in turns. Other forms of racing without differentials includes tractor pulling, mud bogging and other 4x4 motorsports where differential action is not needed.
Vehicles with a single driving wheel. Besides motorcycles, which are generally not classified as automobiles, this group includes most three-wheeled cars. These were quite common in Europe in the mid-20th Century, but have now become rare there. They are still common in some areas of the developing world, such as India. Some early four-wheeled cars also had only one driving wheel to avoid the need for a differential. However, this arrangement led to many problems. The system was unbalanced, the driving wheel would easily spin, etc.. Because of these problems, few such vehicles were made.
Vehicles using two freewheels. A freewheel, as used on a pedal bicycle for example, allows a road wheel to rotate faster than the mechanism that drives it, allowing a cyclist to stop pedalling while going downhill. Some early automobiles had the engine driving two freewheels, one for each driving road wheel. When the vehicle turned, the engine would continue to drive the wheel on the inside of the curve, but the wheel on the outside was permitted to rotate faster by its freewheel. Thus, while turning, the vehicle had only one driving wheel. Driving in reverse is also impossible as is engine braking due to the freewheels.
Vehicles with continuously variable transmissions, such as the DAF Daffodil. The Daffodil, and other similar vehicles which were made until the 1970s by the Dutch company DAF, had a type of transmission that used an arrangement of belts and pulleys to provide an infinite number of gear ratios. The engine drove two separate transmissions which ran the two driving wheels. When the vehicle turned, the two wheels could rotate at different speeds, making the two transmissions shift to different gear ratios, thus functionally substituting for a differential. The slower moving wheel received more driving torque than the faster one, so the system had limited-slip characteristics. The duplication also provided redundancy. If one belt broke, the vehicle could still be driven.
Light vehicles with closely spaced rear wheels, such as the Isetta and Opperman Unicar, or very low mass vehicles.
Vehicles with separate motors for the driving wheels. Electric cars can have a separate motor for each driving wheel, eliminating the need for a differential, but usually with some form of gearing at each motor to get the large wheel torques necessary. A multi-motor electric vehicle such as the Dual Motor Tesla Model S can electronically control the power distribution between the motors on a millisecond scale, effectively an electronic differential. Hybrid vehicles in which the final drive is electric can be configured similarly.
Nice Blog! Truck differential rebuilt, rebuilding, repair
BalasHapus